По просьбе посетителей сайта был разработан регулятор оборотов вала двигателя (РОВД ) постоянного тока по заданному алгоритму.
ТЗ (техническое задание):
1. Работать регулятор должен в трех режимах
2. Первый режим - мощность двигатель должен составлять одно из значений 20%, 40%, 60%, 80%, 100%, время этого цикла 1, 5 или 10секунд.
3. Второй режим - регулятор должен перейти так называемый линейный режим, где возможно оперативно изменять обороты двигателя и сохранить настройки,
время работы не ограничено.
4. Третий режим - мощность двигатель должна иметь одно из значений 25%, 50%, 75%, 100%, время цикла 1, 5 или 10секунд.
5. Параметры, рассмотренные в пунктах 2 - 3 - 4 устанавливает пользователь.
6. После остановки двигателя возможность перехода в режиме реверса.
По выше рассмотренному ТЗ была написанная программа для PIC контроллера, работа которого условно разбита на шесть режимов.
Режим №1
При включении РОВД на светодиодном индикаторе высвечивается «0», питание на обмотки двигатель не поступает.
Режим №2
При нажатии кнопки «Старт» двигатель начинает, вращается на время и скорость ранее записано в EEPROM контроллера. На индикаторе отображается
счет в секундах от ноля до заданного времени цикла первого режима. Энкодер и кнопка «Реверс» не работают.
Режим №3
После первого режима РОВД переходит во второй без остановки двигателя. Обороты поддерживаются на том уровне, что были установленные
предыдущем цикле работы. Изменить обороты можно оперативно с помощью энкодера, изменение отображается на индикаторе.
Модифицированные данные записывается в EEPROM автоматически.
Режим №4
При нажатии кнопок «Стоп» или «Реверс» начинается третий режим, двигатель не останавливается, начинает, вращается на время и скорость ранее
записано в EEPROM контроллера. На индикаторе отображается время работы режима от заданного до нуля в секундах.
Если высвечивается «0» на индикаторе питание на обмотки двигателя не подаются.
Режим №5
Режим реверса работает, при полной остановки двигателя. В режиме реверса переключаются обмотки двигателя, изменяется направление вращение.
Для устранения ситуации, когда по инерции ведомые части привода еще продолжают движение, блокируется работа всех органов управления, что исключает
включение в это время двигатель в обратном направлении вращения. Время нахождение в этом режиме записывается в EEPROM. Работает эта функция
при нажатии кнопки «Реверс» в первом или третьем режиме. В первом устанавливается необходимое направления вращение до включения режима №2
или установки параметров энкодером. В третьем режиме работа аналогична нажатию кнопки «Стоп» выполняется по алгоритму четвертого режима.
Режим №6
Окончание записи в EEPROM.
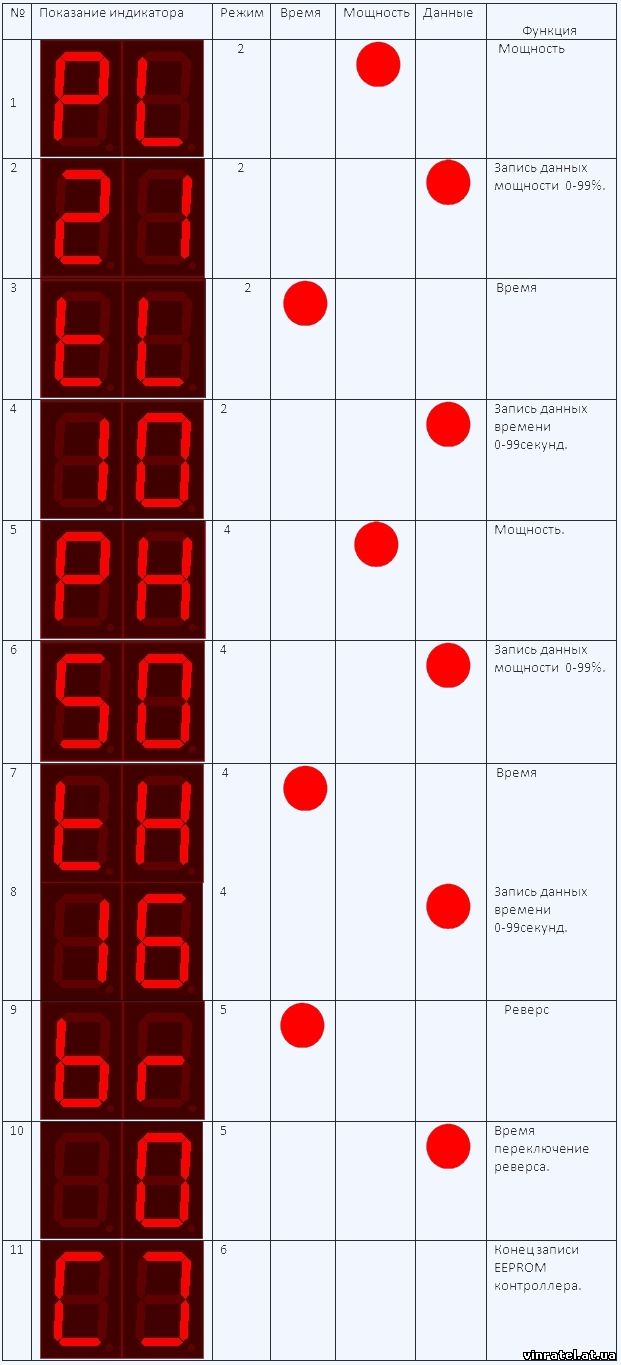
Запись данных в EEPROM контроллера энкодером с кнопкой. Нажатием кнопки «Запись» выбирается параметр время, мощность, вращением энкодера
устанавливают необходимые данные.
Порядок записи в EEPROM контроллера:
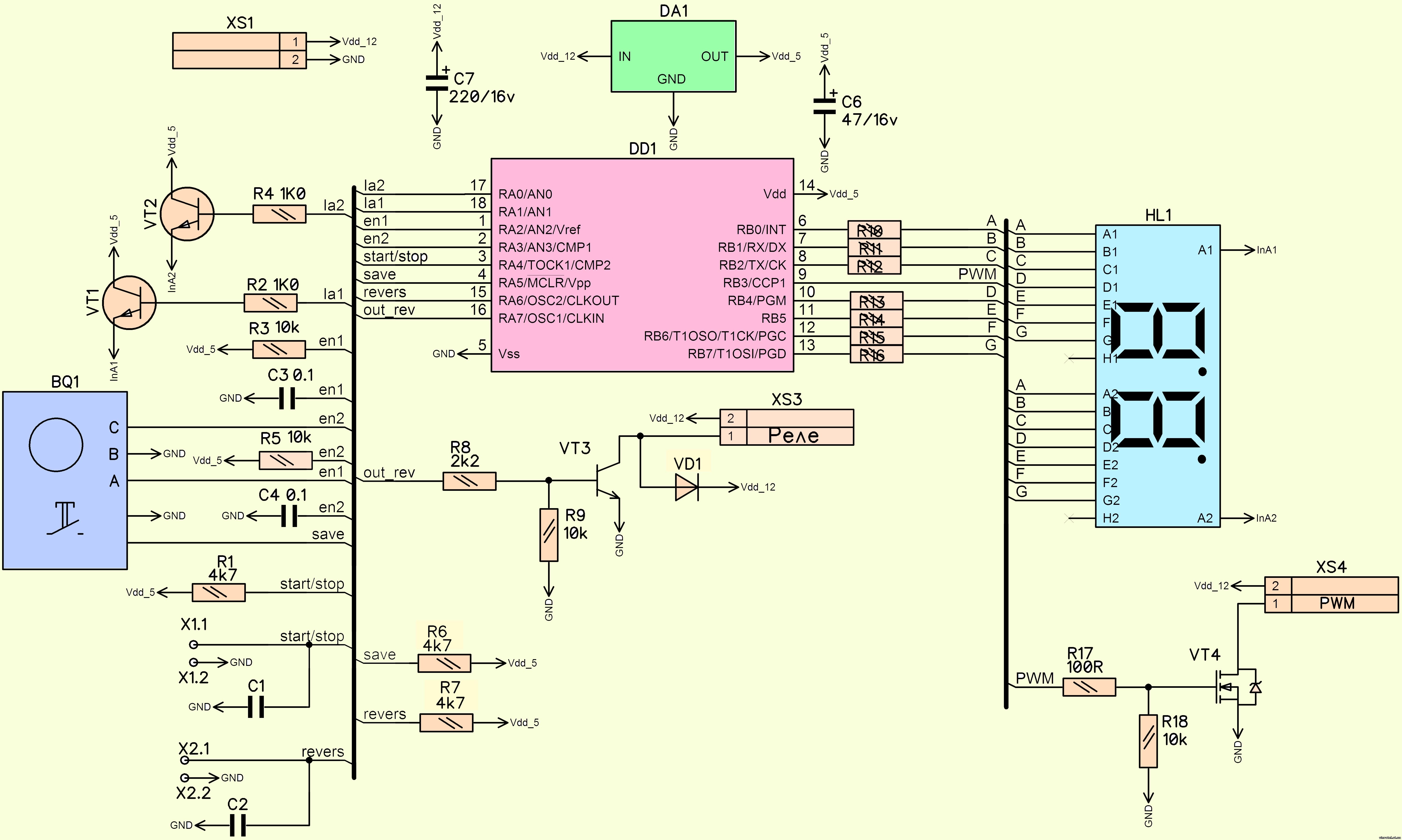
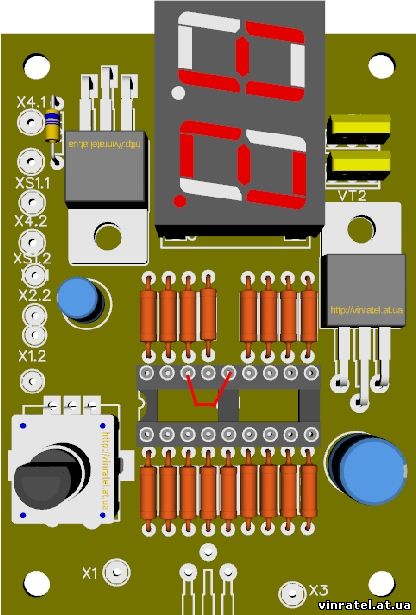
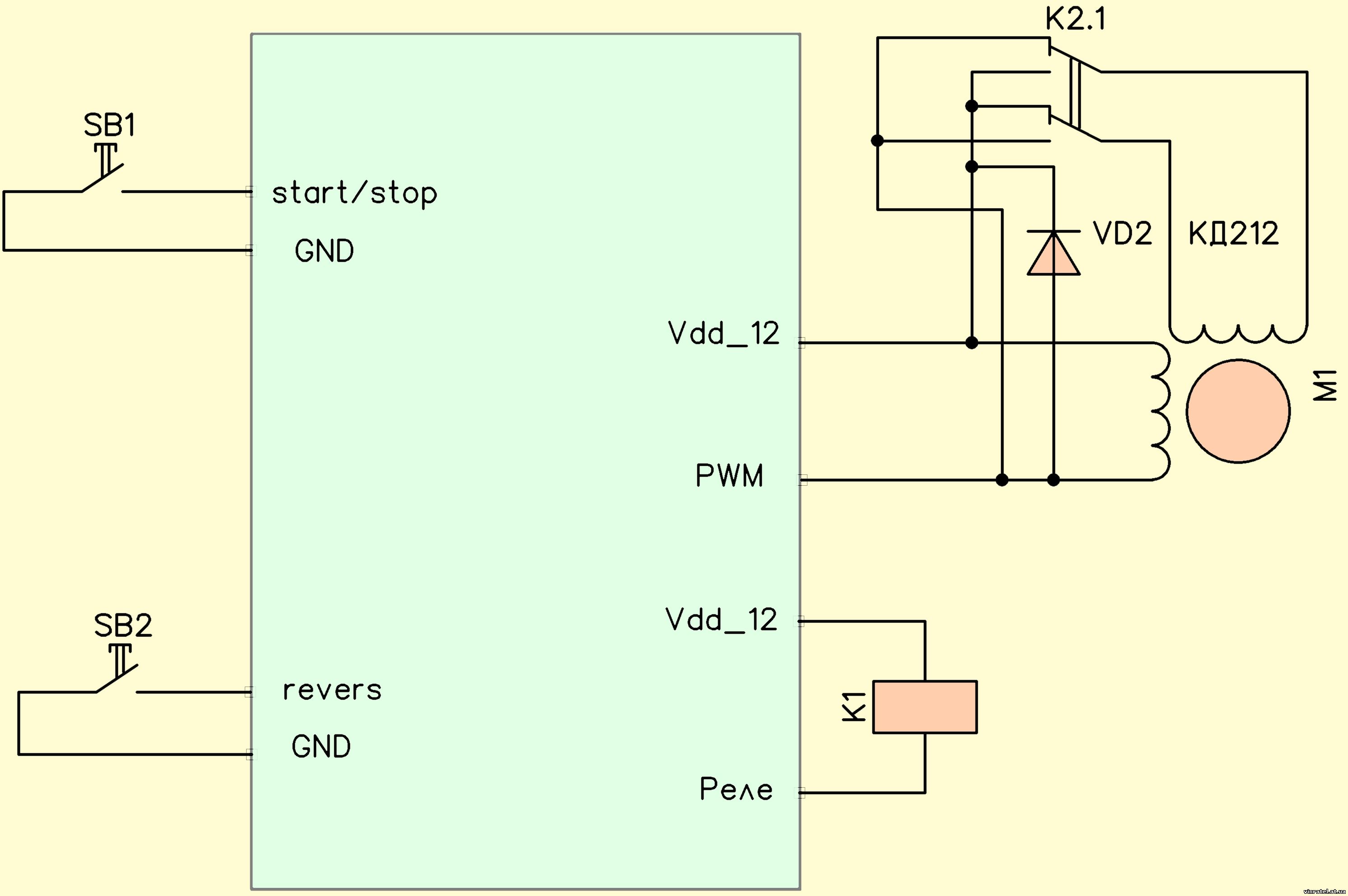
Основу устройства составляет микроконтроллер PIC16F628, к портам которого подключен валкодер, кнопки управления, индикатор, ключ ШИМ и реле реверса.
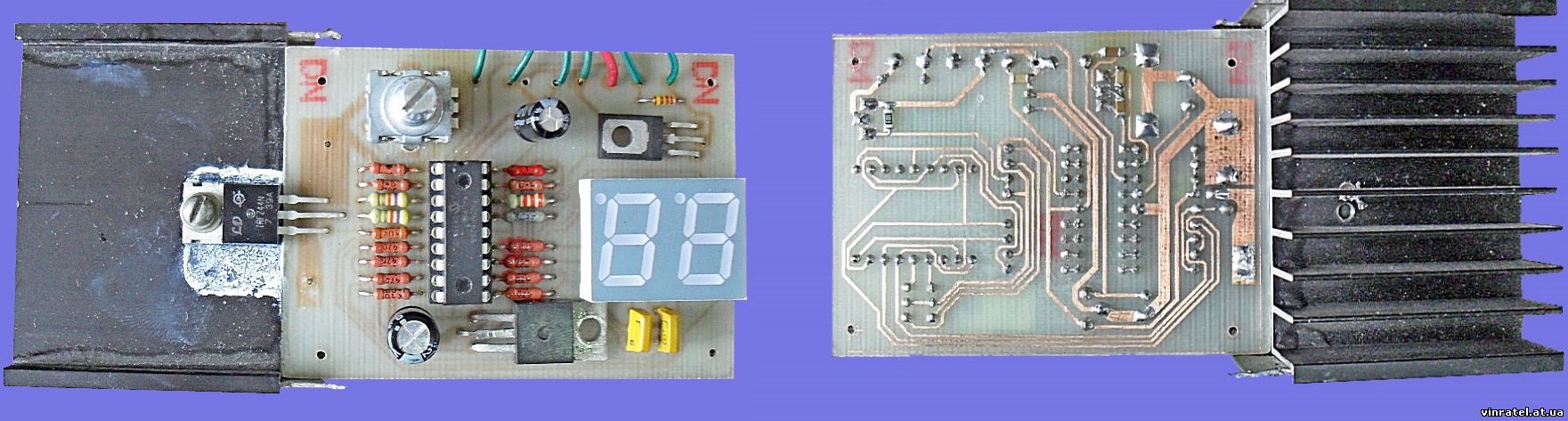
Изготовленная без дефектов плата с рабочими радиоэлементами соответствующие номиналов схемы, прошитым процессором устройство не требует настройки.
Схема настолько простая, что ее могут собирать радиолюбители имеющие разные уровни подготовки.
| № |
Метка |
Значение |
Тип |
| 1 |
BQ1 |
|
PEC12 |
| 2 |
C1,C2,C3,C4 |
0.1 |
1206 |
| 3 |
C6,C7 |
220/16 |
|
| 4 |
DA1 |
7805 |
TO-220 |
| 5 |
DD1 |
PIC16F628A |
DIP18 |
| 6 |
HL1 |
|
DA56-11 |
| 7 |
U |
DIP18 |
|
| 8 |
R1,R6,R7 |
4k7 |
МЛТ0.125 |
| 9 |
R2,R4 |
1K0 |
МЛТ0.125 |
| 10 |
R3,R5,R9,R18 |
10k |
МЛТ0.125 |
| 11 |
R8,R17 |
100R |
МЛТ0.125 |
| 12 |
R10,R11,R12,R13,R14,R15,R16 |
470R |
МЛТ0.125 |
| 13 |
VD1 |
КД522 |
|
| 14 |
VD2 |
КД212 |
|
| 15 |
VT1,VT2 |
КТ315 |
|
| 16 |
VT3,VT4 |
IRFZ44 |
TO-220 |
Для тех, кто имеет небольшой опыт сборки подобных конструкций, предлагаю инструкцию поэтапной работы монтажа платы.
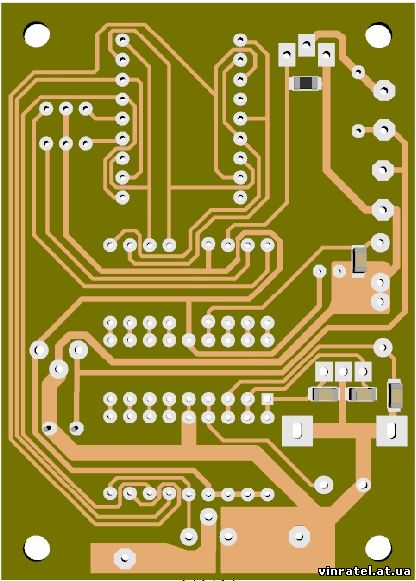
1.После изготовления платы проверить целостность/замыкание дорожек.
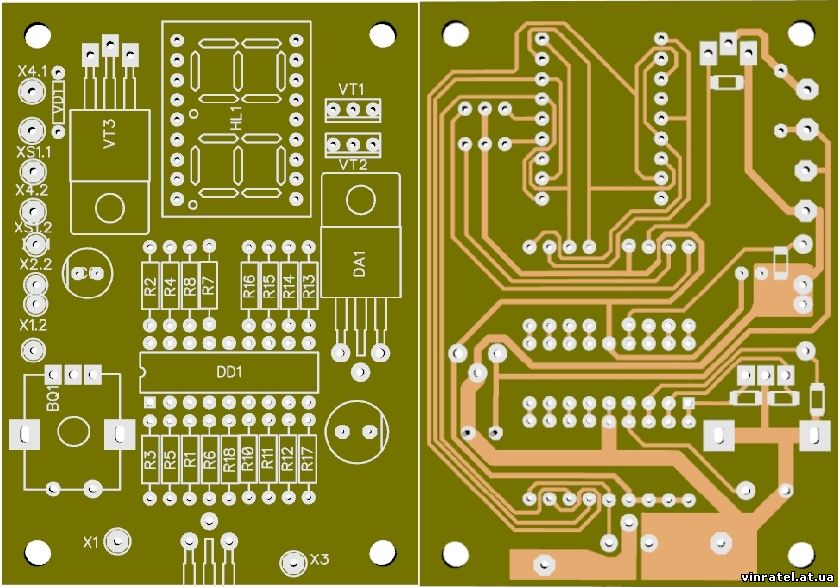
2.Со стороны печатных дорожек установить конденсаторы С1 – С4, резистор R9.
3.Установить С6,С7, микросхему стабилизатора 7805, панельку под микросхему DIP18.
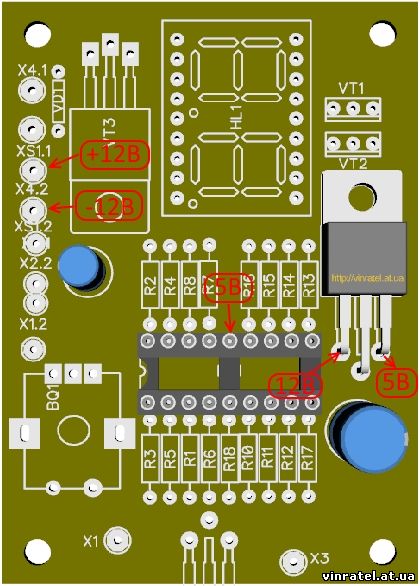
Подать с внешнего источника питания напряжение 12 – 12В, на контрольных точках, показанных на рисунке, проверить напряжения,
если будет несоответствие проверить монтаж, радиоэлементы.
4.Если плата будет установлена в корпус нужно поднять светодиодный индикатор над уровнем установленных радиоэлементов,
для этого возможно применить разъемы
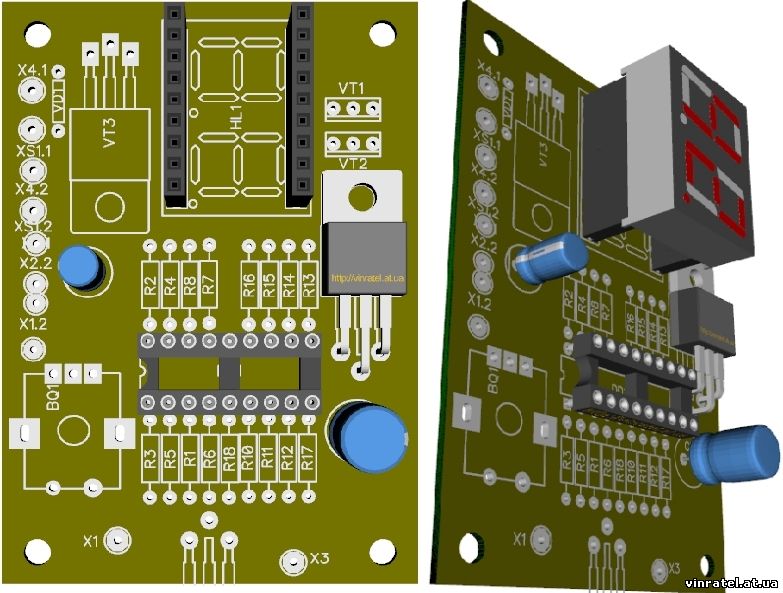
5.Установить резисторы R2-R17, транзисторы VT1,VT2, светодиодный индикатор.
После монтажа этого узла желательно проверить правильно он функционирует. Для этого выводы 18,17,14 на панельки микросхемы соединить.
Подключать по очереди выводы 6-8,10-13 с пятым выводом панельки, при этом должны светится только те сегменты индикатора которые
подключены к проверяемому выводу. После монтажа этого узла желательно проверить правильно он функционирует. Для этого выводы 18,17,14
на панельки микросхемы соединить. Подключать по очереди выводы 6-8,10-13 с пятым выводом панельки, при этом должны светится только
те сегменты индикатора которые подключены к проверяемому выводу.
6.Установить валкодер.
Проверка кнопки валкодера, подключить тестер к выводам 4,5 панельки. При нажатии 0В, отпускании 5В должно меняться на индикаторе прибора.
Проверить работу валкодера возможно подключив щупы тестера к выводам 5 и 1,2 панельки микросхемы, при вращении ручки настройки
показание должно меняется 0В,5В.
7.Следующий этап установка драйвера реле VT3,VD1.
К выводам Х4 2 и 1 платы подключить реле. Возможно, проверить работу данного узла замыкание выводов 16,14 панельки микросхемы,
должно включиться реле.
1.Подключить кнопки управления к выводам Х1.1,Х1.2,Х2.1,Х2.2 платы.
Подключить тестер к выводам 3,15 проверить наличие 5В, при нажатии кнопки подключенной к соответствующему выводу должно быть 0В.
9.В панельку установить запрограммированный микроконтроллер.Проверить работу валкодера, индикатора.
10.Прикрепить транзистор VT4 к радиатору, установить на плате. Если нагрузка меньше 100Вт радиатор не нужен.
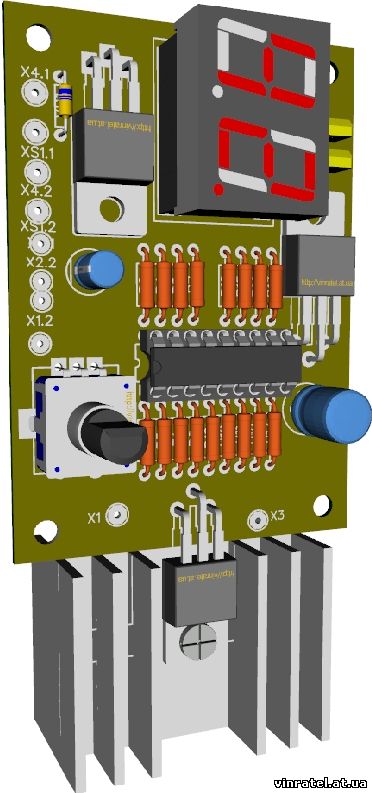
Подключить двигатель, согласно схемы.
 Прошивка Прошивка
Похожие темы:  Паяльная станция - Atmega328 Паяльная станция - Atmega328  Как научить платить за ремонт? Как научить платить за ремонт?  Регулятор скорости двигателя постоянного тока Регулятор скорости двигателя постоянного тока
При использовании материалов сайта, обязательна ссылка на сайт http://vinratel.at.ua
| 