| Главная » Статьи » Статьи » PIC |
За время эксплуатации устройства описанной в статье После изменения в программе работает регулятор следующим образом:
Переключения направления вращения вала двигателя, возможно, коммутировать с помощью Н - моста на транзисторах или реле. Оба варианта имеют свои плюсы и минусы, все же было принято решения применить реле как более дешевый вариант и проще в управлении. Радиодетали имеющееся на то время у меня в наличии определили конструктив всего устройства. Особо каких-то требований применяемых элементам нет, большинство их меняются на аналогичные не ниже по параметрам, чем применены в устройстве. Правильно собранная конструкция с установленными исправными радиодеталями и прошитым микроконтроллером в настройке не нуждается. Радиолюбителям имеющий небольшой опыт сборки подобных устройств предлагаю придерживаться следующего порядка работы: 1. Проверить целостность дорожек и замыканий между ними.
2. Установить микросхему DA1, С3,С4,С5, подпаять соединяющие провода разъем XS1.
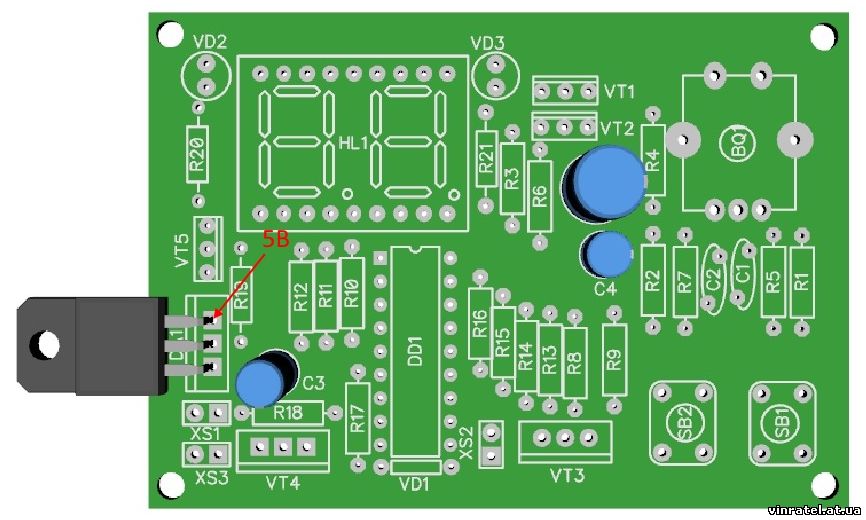
Подать от стабилизированного источника питания (ИП) 9…12В. На выходе стабилизатора должно быть напряжения 5В. 3. Следующий этап установить панельку под микроконтроллер DD1
Омметром проверить отсутствие замыканий между выводами. Подключить ИП, проверить наличие напряжения 5В на выводе 14 относительно вывода 5. 4. Если проверено и работает все нормально, установить тактовые кнопки SB1,SB2 резисторы R1,R2 не забывая при этом тестером проверить исправность кнопок и номиналы резисторов.
Подать напряжения на плату, проверить вольтметром на выводах панельки 3 и 15 наличие 5В. При нажатии кнопки, на проверяемом выводе, должен быть 0В. 5. Установить энкодер BQ1, резисторы R4, R5,R7 конденсаторы С1,С2.
Для проверки этого участка схемы понадобится ИП, который нужно подключить разъему XS1. При нажатии кнопки энкодер на выводе 4 панельки микроконтроллера напряжения будет 0В при отпускании 5В. Работу энкодер возможно проверить вольтметром подключенном к выводам 2 и 3 панельки, при вращении ручки показатели на шкале вольтметра должны меняться. Лучший вариант проверки осциллографом. 6. Светодиодный индикатор HL1, резисторы R3,R6, R10-R16, транзисторы VT1,VT2 установить на плату.
Соединить между собой выводы 14 – 17 – 18 панельки микросхемы.
Перемычку подключить выводу 5, свободным концом по очереди подключать выводы 6 – 8, 10 -13 при этом должны засвечиваться только тот сегменты индикатора вывод который должен быть подключен. 7. Произвести монтаж управления реле и индикаторов направления “Реверс” – R8,R9,R19,R20,R21, VD1,VD2,VD3, VT3,VT5.
Проверить этот узел возможно следующим способом, замыкая выводы 16 по очереди с 5 и 14 должно включатся реле, поменяться индикация на светодиодах VD2,VD3. Диод VD1 по возможности установить на выводах реле. 8.Установить на плату драйвер ШИМ - VT4,R17,R18.
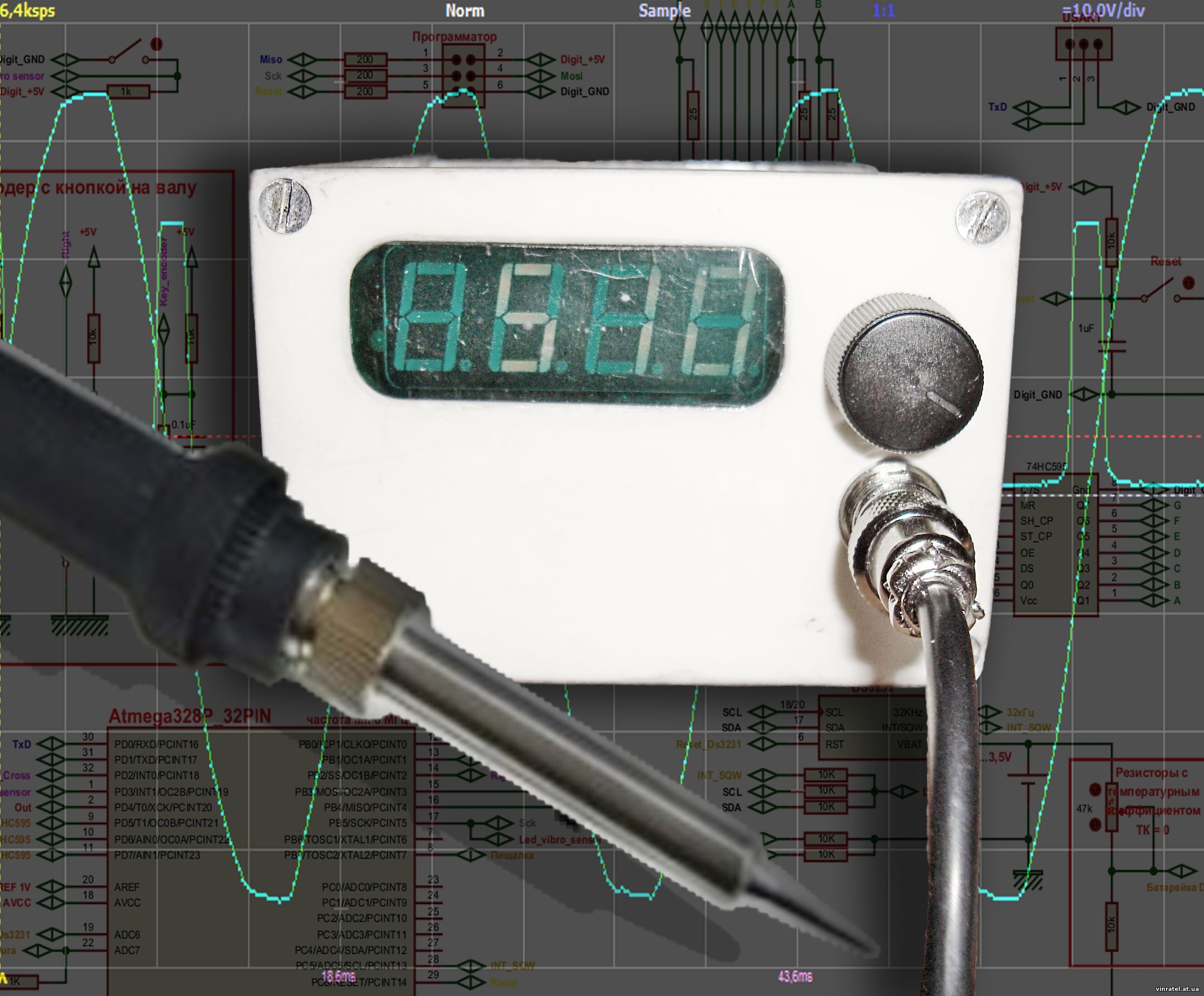
Чтобы проверить работу как работает ШИМ до подключение двигателя разъему XS3.1 через резистор 1..10к подключить ИП. В панельку установить заранее за программированный микроконтроллер.
Осциллографом проконтролировать, как меняется скважность. При отсутствии осциллографа последовательно резистору 1k подключить светодиод при нажатии кнопки “Старт” или вращением энкодер свечения светодиода будет меняться.
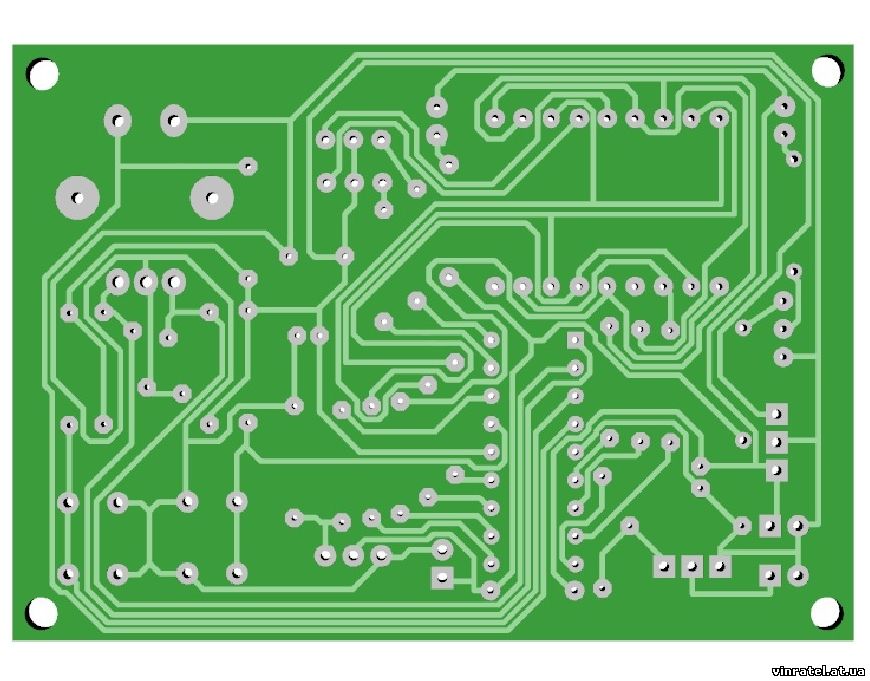
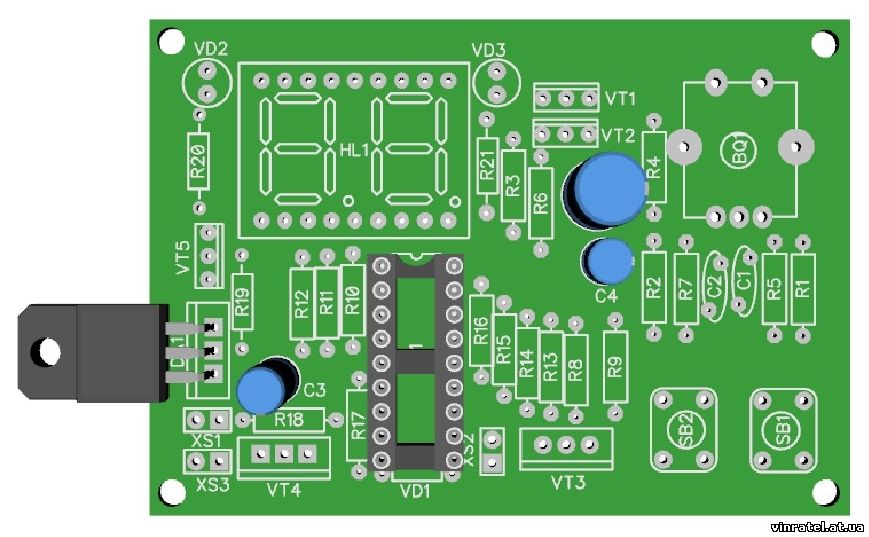
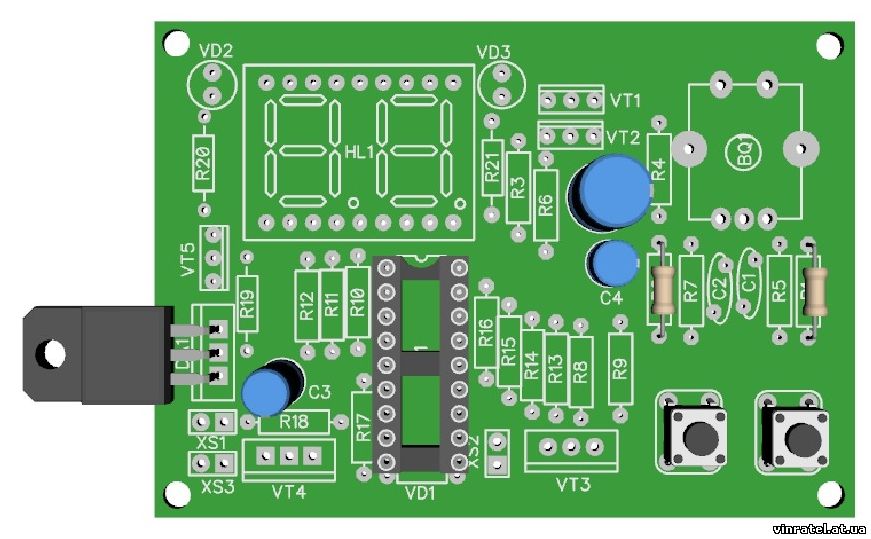
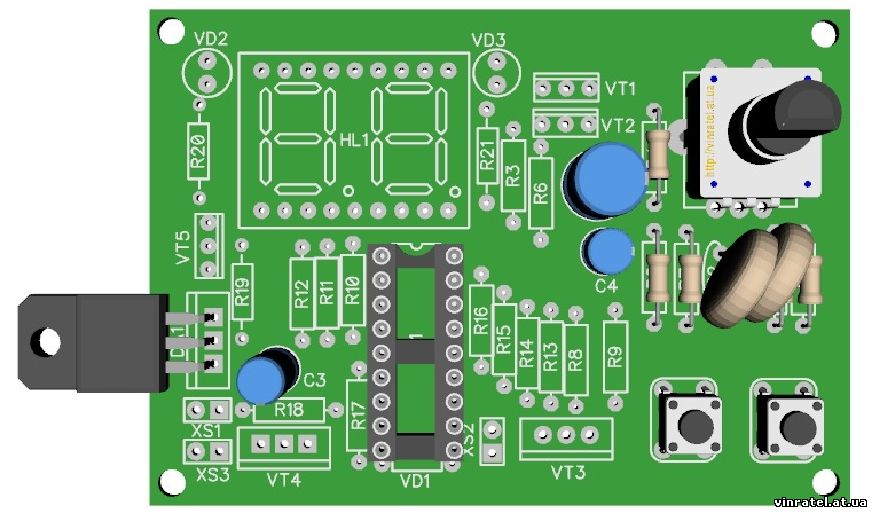
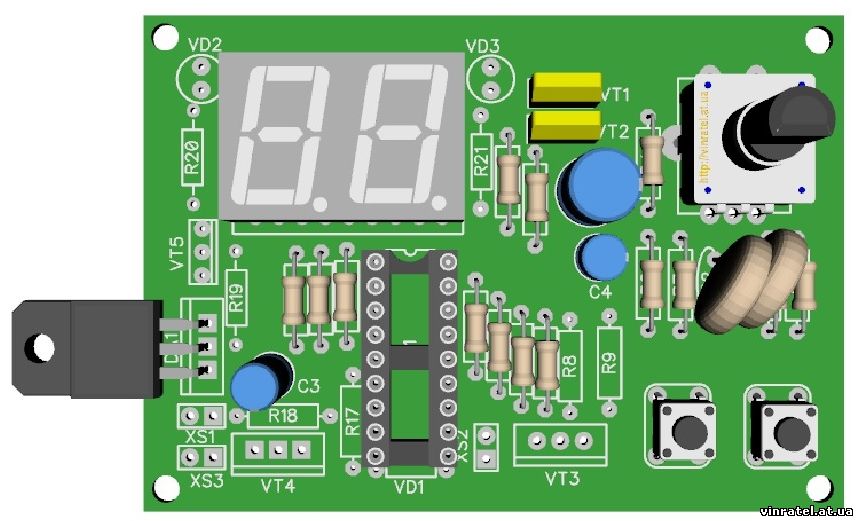
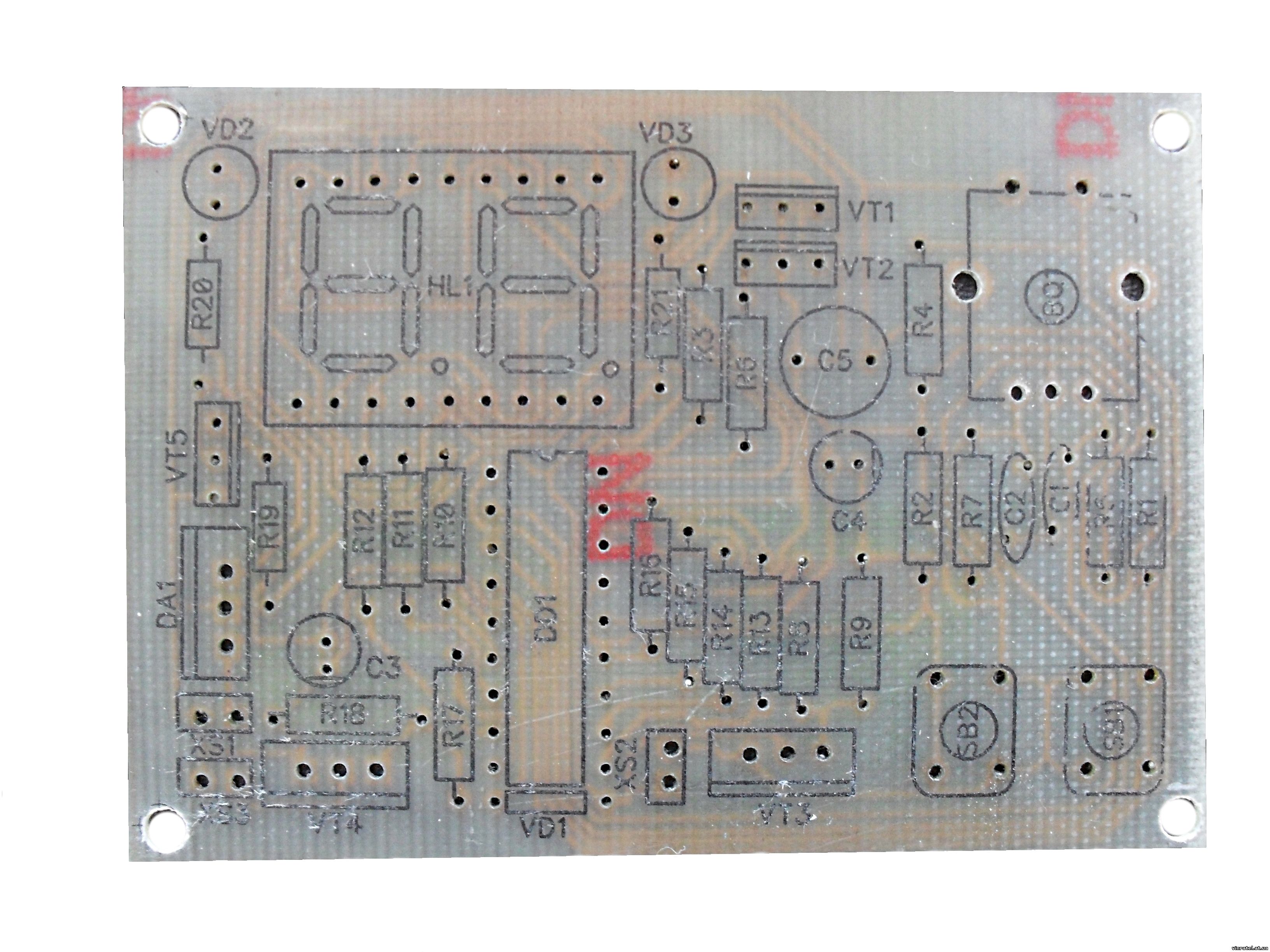
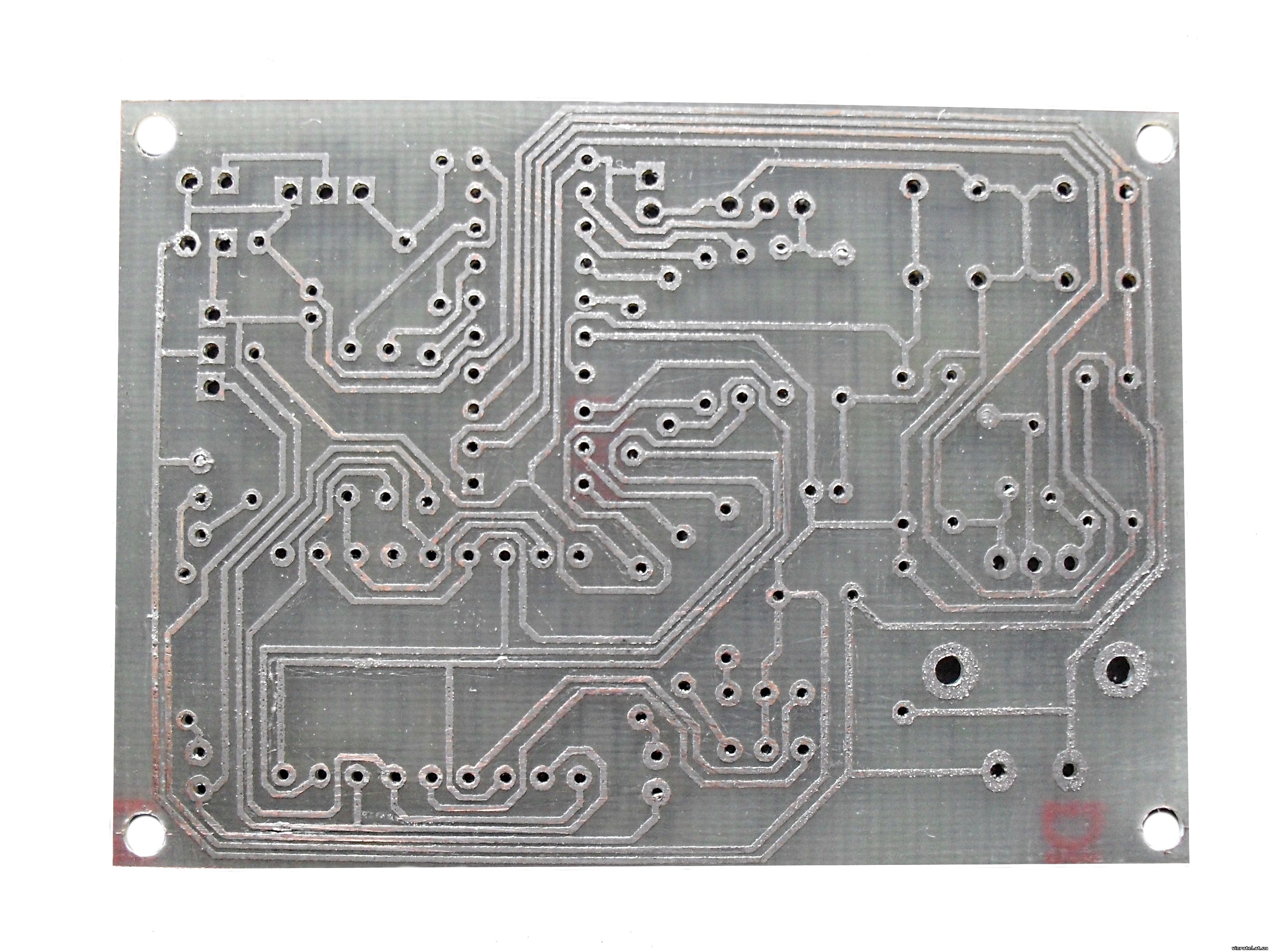
Плата
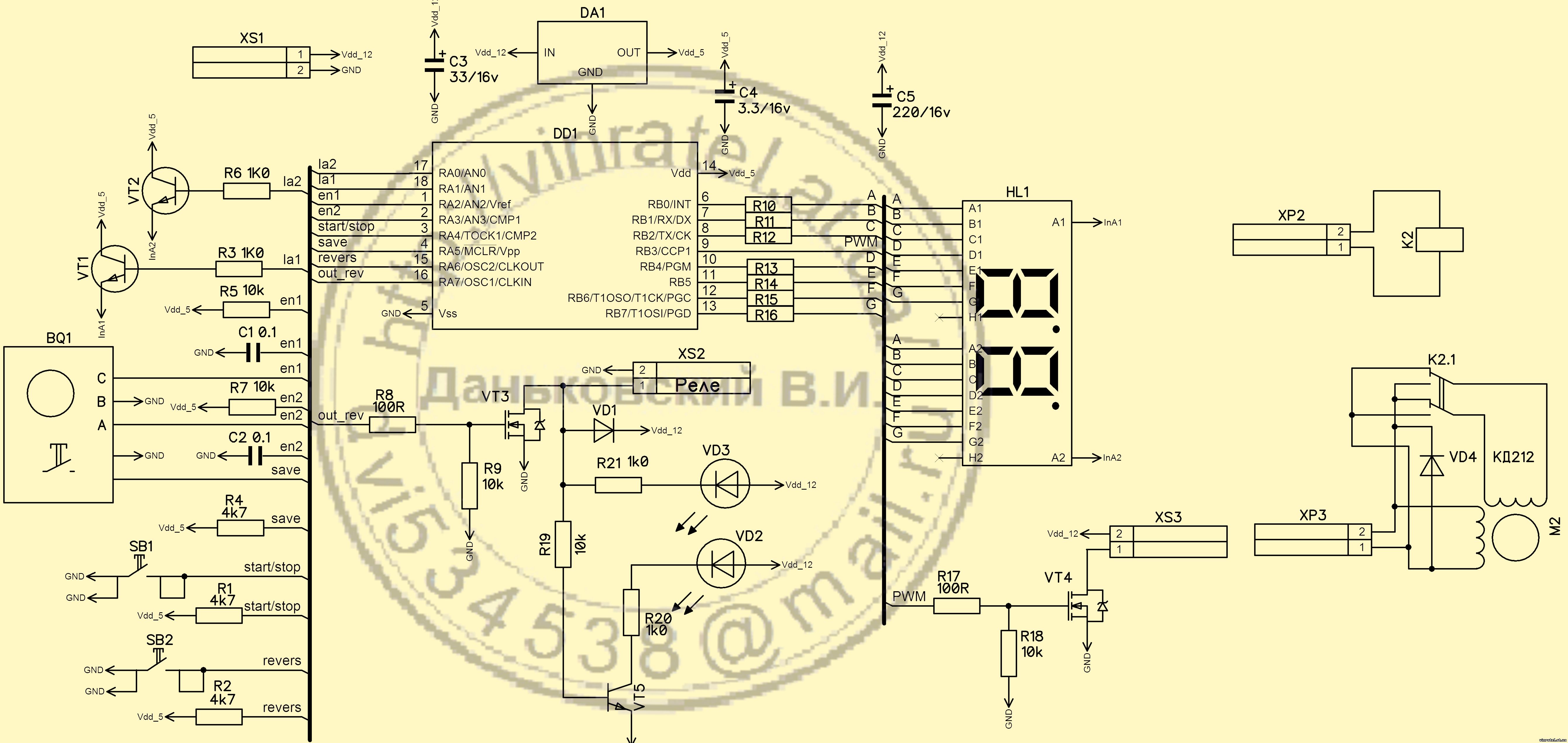
Схема
VT1,VT2, VT5 КТ315, VT3,VT4 IRFZ44 Плата, прошивка скачать…….. Похожие темы: При использовании материалов сайта, обязательна ссылка на сайт http://vinratel.at.ua | |
| Категория: PIC | Добавил: RADAR62 (01.03.2015) | |
| Просмотров: 19861 | Комментарии: 5 |


| Всего комментариев: 5 | |
|
| |



